Marte: O Rover Que Encontrou Seu Próprio Norte Sem GPS
Navegação Tradicional de Rovers em Marte
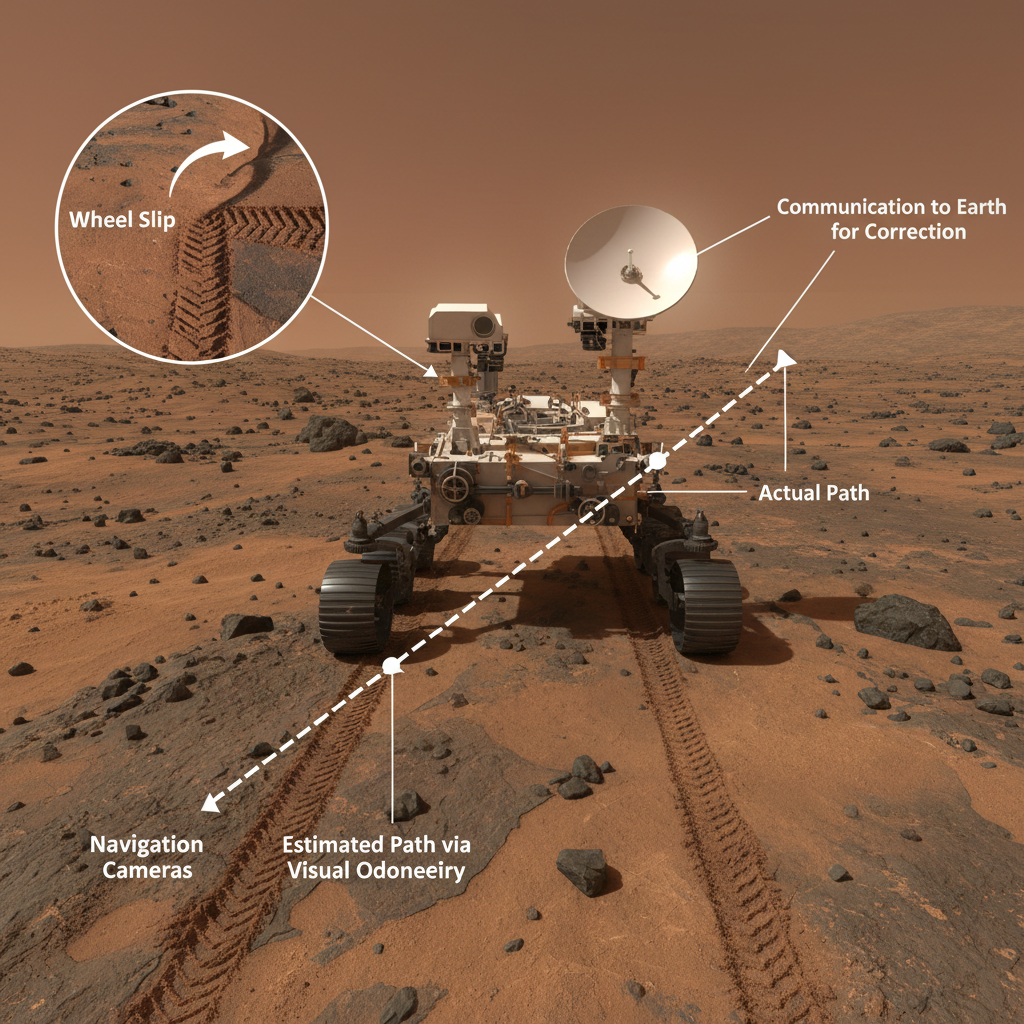
Este infográfico ilustra o método tradicional de odometria visual para navegação de rovers em Marte, destacando como o acúmulo de erros e o deslizamento das rodas exigiam correções frequentes da Terra.
Imagine-se sozinho, ao volante de um veículo de exploração avançado, em um deserto rochoso e implacável, sem estradas, sem mapas, sem GPS e com apenas uma chamada de rádio por dia para que alguém, a milhões de quilômetros de distância, lhe diga exatamente onde você está. Essa tem sido a realidade do rover Perseverance da NASA desde seu pouso em Marte há cinco anos. Uma odisseia de exploração que, até recentemente, dependia de uma conexão umbilical com a Terra para o mais fundamental dos desafios da navegação: saber sua localização exata. Mas agora, essa narrativa mudou. Uma nova tecnologia, um avanço silencioso e engenhoso, permitiu que o Perseverance, pela primeira vez, encontrasse seu próprio caminho, seu próprio norte, sem a ajuda humana. É um passo monumental na autonomia robótica e um vislumbre do futuro da exploração espacial, onde as máquinas não apenas executam tarefas, mas também tomam decisões críticas de forma independente, abrindo novas fronteiras para o conhecimento humano. Essa capacidade recém-adquirida não é apenas uma melhoria incremental; é uma transformação fundamental na maneira como o Perseverance opera e, por extensão, em como futuras missões robóticas e tripuladas poderão navegar por mundos distantes. A tecnologia, batizada de Mars Global Localization, é um testemunho da engenhosidade do Jet Propulsion Laboratory (JPL) da NASA. Ela representa a culminação de anos de pesquisa e desenvolvimento, um esforço para replicar no ambiente hostil de Marte algo tão trivial para nós na Terra quanto um sistema de posicionamento global. Sem uma rede de satélites GPS orbitando o Planeta Vermelho, cada centímetro percorrido pelo rover era um ato de fé e cálculo meticuloso, com a equipe na Terra atuando como os olhos e o cérebro que guiavam a máquina através de paisagens desconhecidas. Agora, o Perseverance tem seus próprios olhos e seu próprio cérebro para essa tarefa crucial. Historicamente, a navegação em Marte para rovers tem sido um desafio complexo e demorado. Desde os primeiros robôs exploradores, como o Sojourner da missão Mars Pathfinder em 1997, até os mais recentes, como o Curiosity e o próprio Perseverance, a estratégia principal para determinar a posição tem sido a odometria visual. Este método envolve a análise de imagens capturadas pelas câmeras de navegação do rover a cada poucos metros de deslocamento. Ao comparar características geológicas em quadros sucessivos e levar em conta o deslizamento das rodas, o rover pode estimar a distância percorrida e a direção. No entanto, como qualquer sistema de medição, a odometria visual acumula pequenos erros. Com o tempo, esses erros se somam, e a incerteza sobre a localização exata do rover pode crescer significativamente. Em longas viagens, essa margem de erro pode exceder 30 metros, uma distância considerável em um terreno repleto de rochas, crateras e outros perigos. Essa imprecisão, por sua vez, forçava o rover a interromper sua jornada, aguardando novas instruções da Terra, um processo que consumia tempo valioso da missão. A odometria visual, embora fundamental, possui limitações intrínsecas que a tornam inadequada para a navegação autônoma de longo alcance. O deslizamento das rodas em terrenos arenosos ou rochosos, por exemplo, não é perfeitamente previsível e pode introduzir erros sistemáticos.
Além disso, a mudança nas condições de iluminação ao longo do dia marciano pode alterar a aparência das características do terreno, dificultando a correspondência precisa entre as imagens. A poeira, onipresente em Marte, também pode obscurecer detalhes cruciais. Esses fatores combinados significam que, para manter a precisão necessária para uma exploração segura e eficiente, a odometria visual precisa ser periodicamente recalibrada ou corrigida por um método externo mais preciso. É nesse ponto que a intervenção humana, com a comparação de imagens com mapas orbitais, se tornou indispensável por décadas. O contexto histórico da exploração marciana é crucial para entender a magnitude dessa inovação. As primeiras missões a Marte, como as sondas Viking nos anos 70, eram estações fixas, sem necessidade de navegação. Com a chegada dos rovers, a mobilidade trouxe a necessidade de posicionamento. O Sojourner, um pequeno robô do tamanho de um forno de micro-ondas, movia-se lentamente e era guiado com extrema cautela. Ele era, em essência, um veículo de controle remoto com um atraso de comunicação significativo, exigindo que cada movimento fosse planejado e executado passo a passo pela equipe na Terra. A sua capacidade de processamento era mínima, e a navegação era quase inteiramente manual. Os rovers Spirit e Opportunity, que pousaram em 2004, eram muito mais capazes, mas ainda dependiam fortemente da equipe de engenheiros na Terra para planejar suas rotas e confirmar suas posições. Esses rovers introduziram conceitos de navegação mais avançados, como a capacidade de detectar e desviar de obstáculos simples em seu caminho imediato, mas a determinação da localização global ainda era um processo laborioso. O Curiosity, que chegou em 2012, introduziu o sistema AutoNav, uma forma rudimentar de direção autônoma que permitia ao rover desviar de obstáculos por conta própria. Mas mesmo com o AutoNav, a precisão da localização era um gargalo. A cada parada, a equipe na Terra recebia panoramas de 360 graus do rover, que eram então comparados com imagens de alta resolução de satélites orbitais, como o Mars Reconnaissance Orbiter (MRO). Esse processo de triangulação e confirmação levava um dia ou mais, limitando a distância que o rover podia percorrer em um único ciclo de comando. A dependência do MRO para a confirmação de localização é um ponto importante. O MRO, lançado em 2005, tem sido um recurso inestimável para todas as missões de superfície subsequentes. Sua câmera HiRISE (High Resolution Imaging Science Experiment) produz imagens com resolução de até 25 centímetros por pixel, permitindo que os cientistas na Terra identifiquem rochas individuais e características do terreno. Essa capacidade de mapeamento detalhado do terreno marciano, combinada com dados de altimetria laser (MOLA) do Mars Global Surveyor, criou os mapas topográficos de alta resolução que são a base para a nova tecnologia do Perseverance. A equipe de navegação na Terra passava horas analisando essas imagens e comparando-as com as fotos do rover para traçar sua posição, um trabalho que exigia não apenas expertise técnica, mas também uma compreensão profunda da geologia marciana para identificar pontos de referência únicos.

Mars Global Localization: O Novo GPS Marciano
O infográfico detalha a tecnologia Mars Global Localization, que permite ao rover Perseverance determinar sua própria posição em Marte, utilizando dados de referência orbitais e processamento a bordo.
Foi nesse cenário de dependência e lentidão que a necessidade de uma solução mais autônoma se tornou premente. A ideia de um “GPS marciano” sem satélites era um desafio formidável. O conceito por trás do Mars Global Localization é elegante em sua simplicidade, embora complexo em sua execução: permitir que o próprio rover compare suas imagens de navegação com mapas topográficos orbitais de alta resolução que já estão a bordo. O algoritmo desenvolvido no JPL é o coração dessa tecnologia. Ele processa rapidamente as imagens panorâmicas das câmeras do Perseverance e as alinha com os mapas de terreno, identificando pontos de referência e padrões que permitem ao rover determinar sua posição com uma precisão notável. Em cerca de dois minutos, o sistema pode localizar o rover com uma margem de erro de apenas 25 centímetros. Isso é um salto quântico em comparação com a incerteza de dezenas de metros que o sistema anterior apresentava. A precisão de 25 centímetros não é arbitrária; ela é crucial para a segurança e a eficiência da missão. Com essa precisão, o rover pode operar com muito mais confiança em terrenos complexos, evitando obstáculos com margens menores e acessando locais científicos de interesse que antes seriam considerados arriscados demais. Essa capacidade de autolocalização é um pilar fundamental para a próxima geração de exploração robótica, onde os rovers precisarão operar por períodos mais longos e em áreas mais vastas sem a constante supervisão humana. A implementação dessa tecnologia não foi um acaso. Ela foi o resultado de uma busca contínua por otimização e autonomia. Vandi Verma, engenheira-chefe de operações robóticas para a missão no JPL, descreve a inovação como “quase como dar um GPS ao rover”. Ela enfatiza que isso significa que o Perseverance poderá dirigir por distâncias muito maiores de forma autônoma, explorando mais do planeta e coletando mais dados científicos. E, o que é ainda mais promissor, essa tecnologia poderia ser aplicada a quase qualquer outro rover que precise viajar rápido e longe em ambientes extraterrestres. A primeira vez que o Mars Global Localization foi usado com sucesso em operações regulares da missão foi em 2 de fevereiro, e novamente em 16 de fevereiro, marcando um novo capítulo na história da exploração robótica. Um aspecto fascinante dessa história é a origem do poder de processamento que tornou essa autonomia possível. O algoritmo do Mars Global Localization não roda nos computadores principais do Perseverance. Esses computadores, projetados para sobreviver ao ambiente de radiação intensa de Marte, são baseados em hardware de 1997, robustos, mas relativamente lentos. Em vez disso, o novo algoritmo utiliza o processador da Estação Base do Helicóptero (HBS) do rover, que era usado para se comunicar com o agora aposentado helicóptero Ingenuity. O HBS é equipado com um processador comercial que alimentava muitos smartphones de meados dos anos 2010 – mais de 100 vezes mais rápido que os computadores principais do rover.
A história do Ingenuity é, por si só, uma saga de inovação. Projetado como uma demonstração tecnológica para realizar no máximo cinco voos, ele superou todas as expectativas, completando 72 voos históricos. Essa missão de risco calculado permitiu o uso de chips comerciais mais potentes, que não haviam sido testados para o rigor do espaço profundo, mas que se mostraram incrivelmente resilientes. Como Verma observa, o Ingenuity “abriu o caminho, provando que poderíamos usar processadores comerciais em Marte”. O poder de processamento do HBS foi, de certa forma, um “presente” inesperado, uma capacidade latente que a equipe do Perseverance soube aproveitar. A decisão de usar um processador comercial no Ingenuity foi uma aposta calculada. Tradicionalmente, missões espaciais empregam processadores 'endurecidos por radiação' (rad-hard), que são projetados para resistir aos níveis elevados de radiação encontrados no espaço. No entanto, esses chips são geralmente mais antigos, mais lentos e muito mais caros. O Ingenuity, sendo uma demonstração tecnológica de baixo custo e alto risco, teve a flexibilidade de experimentar com hardware comercial, como o processador Snapdragon 801 da Qualcomm. A resiliência inesperada desse chip, que operou sem falhas significativas por mais de dois anos no ambiente marciano, mudou a percepção da comunidade espacial sobre o uso de componentes comerciais. Esse sucesso abriu as portas para o uso de tecnologias mais avançadas e acessíveis em futuras missões, e o aproveitamento do HBS do Perseverance é um exemplo direto dessa mudança de paradigma. A dimensão humana por trás dessa descoberta é tão inspiradora quanto a própria tecnologia. Engenheiros como Jeremy Nash, que liderou a equipe do projeto sob a supervisão de Verma, trabalharam incansavelmente para transformar um problema teórico de décadas em uma solução prática para o espaço. A equipe começou a trabalhar em 2023, testando a precisão do algoritmo com dados de 264 paradas anteriores do rover. Em cada um desses testes, o algoritmo comparou as fotos panorâmicas do rover com as imagens do MRO e conseguiu pinpointar a localização do rover com precisão. Essa validação rigorosa em dados históricos deu a confiança necessária para implementar a tecnologia em tempo real. Mas o caminho não foi isento de desafios. A integração de um processador comercial em um sistema de missão crítica exigiu uma abordagem cuidadosa. A equipe desenvolveu um “teste de sanidade” para garantir a confiabilidade: o algoritmo é executado várias vezes no HBS, e um dos computadores principais do rover verifica se os resultados são consistentes. Durante os testes, eles descobriram um pequeno dano em cerca de 25 bits da memória de 1 gigabyte do processador – uma fração minúscula, mas que poderia comprometer a precisão. A solução foi isolar esses bits danificados durante a execução do algoritmo.
Impacto da Autonomia na Exploração Futura
O infográfico projeta o impacto da autonomia robótica na futura exploração de Marte, permitindo maior velocidade de travessia, menos intervenção humana e abrindo caminho para missões tripuladas.
Esses pequenos detalhes, essas soluções engenhosas para problemas inesperados, são o que definem a excelência em engenharia espacial. A equipe de engenheiros e cientistas do JPL não apenas dominou a complexidade da robótica e da computação, mas também demonstrou uma notável capacidade de adaptação e improvisação. A reutilização de hardware de uma missão primária (o Ingenuity) para uma função secundária crucial (o Mars Global Localization) é um exemplo brilhante de engenhosidade e otimização de recursos. Essa mentalidade de 'faça você mesmo' e 'aproveite ao máximo o que você tem' é uma característica distintiva da exploração espacial, onde os recursos são limitados e as oportunidades de reparo ou substituição são praticamente inexistentes. A colaboração entre diferentes equipes – desde os engenheiros de software que desenvolveram o algoritmo até os especialistas em hardware que garantiram a integridade do processador – foi fundamental para o sucesso. As implicações dessa nova capacidade são vastas e multifacetadas. Em primeiro lugar, o aumento da autonomia de navegação significa que o Perseverance pode cobrir distâncias muito maiores em menos tempo. Antes, a incerteza da localização era o principal fator limitante para a distância que o rover podia percorrer sem intervenção humana. Se o rover acreditasse estar muito perto de um terreno perigoso devido a erros acumulados na odometria visual, ele pararia e esperaria por instruções. Agora, com a capacidade de se localizar com precisão, o Perseverance pode ser comandado para dirigir distâncias potencialmente ilimitadas sem “ligar para casa”. Isso não apenas acelera a exploração, mas também libera a equipe na Terra para se concentrar em tarefas mais complexas e estratégicas, em vez de passar horas diariamente confirmando a posição do rover. A redução da carga de trabalho da equipe na Terra é um benefício significativo. Cada hora gasta na navegação manual é uma hora a menos para a análise de dados científicos, o planejamento de experimentos ou o desenvolvimento de novas estratégias de exploração. Ao automatizar a tarefa de localização, a equipe pode realocar seus recursos intelectuais para problemas mais desafiadores e de maior valor científico, maximizando o retorno da missão. Além disso, essa inovação se soma a outros avanços recentes na autonomia do Perseverance. Recentemente, a equipe implementou o primeiro uso de inteligência artificial generativa para ajudar a planejar rotas de condução, selecionando waypoints que antes eram escolhidos manualmente por operadores humanos. A combinação do Mars Global Localization com o AutoNav aprimorado e a IA generativa cria um rover que é mais do que apenas um veículo; é um explorador semi-autônomo, capaz de tomar decisões complexas e adaptativas em um ambiente dinâmico. Essa sinergia de tecnologias não apenas aumenta a eficiência da missão, mas também minimiza a carga de trabalho da equipe, permitindo que os cientistas e engenheiros dediquem mais tempo à análise de dados e à formulação de novas perguntas científicas. A integração da IA generativa na seleção de waypoints é um exemplo notável de como a inteligência artificial está transformando a exploração espacial. Em vez de humanos gastarem horas analisando imagens de terreno e escolhendo pontos seguros e eficientes para o rover se mover, a IA pode agora sugerir rotas otimizadas, levando em consideração fatores como inclinação do terreno, presença de rochas, distância e objetivos científicos. Isso não só acelera o processo de planejamento, mas também pode levar a rotas mais eficientes e seguras que talvez não fossem imediatamente óbvias para um operador humano.
A combinação dessas capacidades – autolocalização precisa, navegação autônoma e planejamento de rotas assistido por IA – representa um salto em direção à verdadeira autonomia robótica. Mas o que essa maior autonomia significa para a ciência? Significa que o Perseverance pode atingir seus alvos científicos com mais rapidez, explorando uma área maior da cratera Jezero e coletando mais amostras de rochas e solo. A missão principal do Perseverance é procurar sinais de vida microbiana antiga e coletar amostras para um eventual retorno à Terra. Cada dia que o rover passa dirigindo em vez de esperar por comandos da Terra é um dia a mais para a ciência. A capacidade de navegar por terrenos mais desafiadores com confiança abre novas áreas de exploração que antes seriam consideradas muito arriscadas ou demoradas. Isso pode levar à descoberta de novas formações geológicas, minerais e, potencialmente, evidências de vida passada que poderiam ter permanecido ocultas. A cratera Jezero, local de pouso do Perseverance, é de particular interesse científico devido à evidência de que já abrigou um lago e um delta de rio. A busca por bioassinaturas – evidências de vida passada – é uma tarefa meticulosa que exige a exploração de múltiplos locais dentro da cratera, cada um com suas próprias características geológicas. A capacidade de o rover se mover de forma mais eficiente entre esses locais, e de acessar áreas que antes seriam inacessíveis devido a preocupações de navegação, aumenta significativamente as chances de sucesso na identificação e coleta das amostras mais promissoras. Além disso, a precisão da localização é crucial para o contexto geológico das amostras. Ao saber exatamente onde cada amostra foi coletada, os cientistas na Terra poderão reconstruir o ambiente antigo de Marte com maior fidelidade quando as amostras forem finalmente trazidas para análise. O contexto mais amplo da exploração espacial também se beneficia enormemente. A ausência de um sistema GPS em outros corpos celestes é um problema universal. Na Lua, por exemplo, as condições de iluminação extremas – longas noites lunares frias e sombras profundas – tornam a navegação ainda mais desafiadora. A equipe do JPL já está olhando para a Lua como o próximo campo de aplicação para essa tecnologia. Missões futuras, tanto robóticas quanto tripuladas, para a Lua e além, poderiam se beneficiar imensamente de sistemas de localização autônomos. Imagine astronautas em Marte ou na Lua, com um sistema que lhes permite saber sua posição exata em tempo real, sem depender de comunicações com a Terra. Isso não apenas aumenta a segurança, mas também a eficiência e a produtividade de suas operações. A aplicação dessa tecnologia à exploração lunar é particularmente relevante com o programa Artemis da NASA, que visa retornar humanos à Lua e estabelecer uma presença sustentável. Rovers lunares e veículos tripulados precisarão de sistemas de navegação robustos e autônomos para operar em um ambiente onde as sombras podem ser longas e mutáveis, e onde a poeira lunar (regolito) pode ser um desafio para a odometria visual.
A capacidade de se localizar com precisão, mesmo em condições de iluminação desfavoráveis, será um divisor de águas para a exploração lunar. Além da Lua, essa tecnologia tem implicações para missões a outros planetas e luas do sistema solar. Por exemplo, a futura missão Dragonfly para Titã, a lua de Saturno, que usará um drone-rotorcraft para explorar a superfície, enfrentará desafios de navegação únicos em uma atmosfera densa e com pouca luz solar. Sistemas de localização baseados em reconhecimento de terreno podem ser adaptados para esses ambientes, permitindo que as sondas explorem com maior autonomia e segurança. A capacidade de operar de forma mais independente da Terra também é crucial para missões em planetas mais distantes, onde os atrasos de comunicação são ainda maiores. Em Júpiter ou Saturno, por exemplo, um comando pode levar horas para chegar ao seu destino, tornando a navegação em tempo real a partir da Terra praticamente impossível. A autonomia de navegação se torna, então, uma necessidade absoluta. O desenvolvimento do Mars Global Localization não é apenas um avanço tecnológico; é um passo evolutivo na relação entre humanos e máquinas na exploração espacial. Estamos testemunhando a transição de robôs que são meros executores de comandos para robôs que são colaboradores inteligentes, capazes de tomar decisões complexas e adaptar-se a ambientes imprevisíveis. Essa evolução é fundamental para a visão de longo prazo da exploração espacial, que inclui o estabelecimento de bases humanas em outros planetas e a exploração de regiões do sistema solar que hoje parecem inatingíveis. A confiança em máquinas autônomas não é apenas uma questão de conveniência, mas de necessidade para a sobrevivência e o sucesso em ambientes tão hostis e distantes. As questões em aberto são muitas e fascinantes. Como essa autonomia crescente impactará a interação entre os cientistas na Terra e os rovers no espaço? Será que veremos rovers que podem, por si só, identificar fenômenos científicos inesperados e alterar seus planos de missão para investigá-los? Qual será o próximo salto em inteligência artificial e robótica que nos permitirá explorar mundos ainda mais desafiadores, como as luas oceânicas de Júpiter e Saturno, onde a navegação subaquática autônoma será o próximo grande desafio? A história do Perseverance e do Mars Global Localization é um lembrete de que a exploração espacial é um campo de inovação contínua, onde a engenhosidade humana, a paixão pela descoberta e a busca incansável por soluções nos impulsionam para além dos limites do conhecido. É uma narrativa de progresso que nos prepara para um futuro onde a presença humana e robótica no cosmos será cada vez mais autônoma, eficiente e, acima de tudo, inspiradora.
Tags
📱 Texto para Redes Sociais
Comentários
Faça login para deixar um comentário.
Nenhum comentário ainda. Seja o primeiro!
Artigos Relacionados

O GPS de Marte: Rover Perseverance Ganha Olhos Próprios e Autonomia Sem Precedentes
O rover Perseverance da NASA acaba de receber uma atualização revolucionária: o Mars Global Localization, uma tecnologia que permite ao robô determinar sua própria localização em Marte com precisão de 25 centímetros. Utilizando um algoritmo que compara imagens panorâmicas com mapas orbitais, o sistema elimina a dependência humana para orientação, permitindo que o rover percorra distâncias muito maiores de forma autônoma. Este avanço representa um salto gigantesco na autonomia robótica e abre caminho para uma exploração marciana mais eficiente e produtiva.
Perseverance no Deserto Marciano: O Rover que Encontrou Seu Próprio Caminho
O rover Perseverance da NASA agora pode determinar sua localização exata em Marte de forma autônoma, usando uma nova tecnologia chamada Mars Global Localization. Este sistema compara imagens panorâmicas do rover com mapas orbitais, permitindo-lhe navegar com precisão de 25 centímetros em apenas dois minutos. A inovação, que utiliza um processador do helicóptero Ingenuity, acelera a exploração e reduz a dependência de operadores na Terra, abrindo caminho para missões mais eficientes e autônomas no futuro.
Marte Habitável: O Sonho de Modelar um Mundo
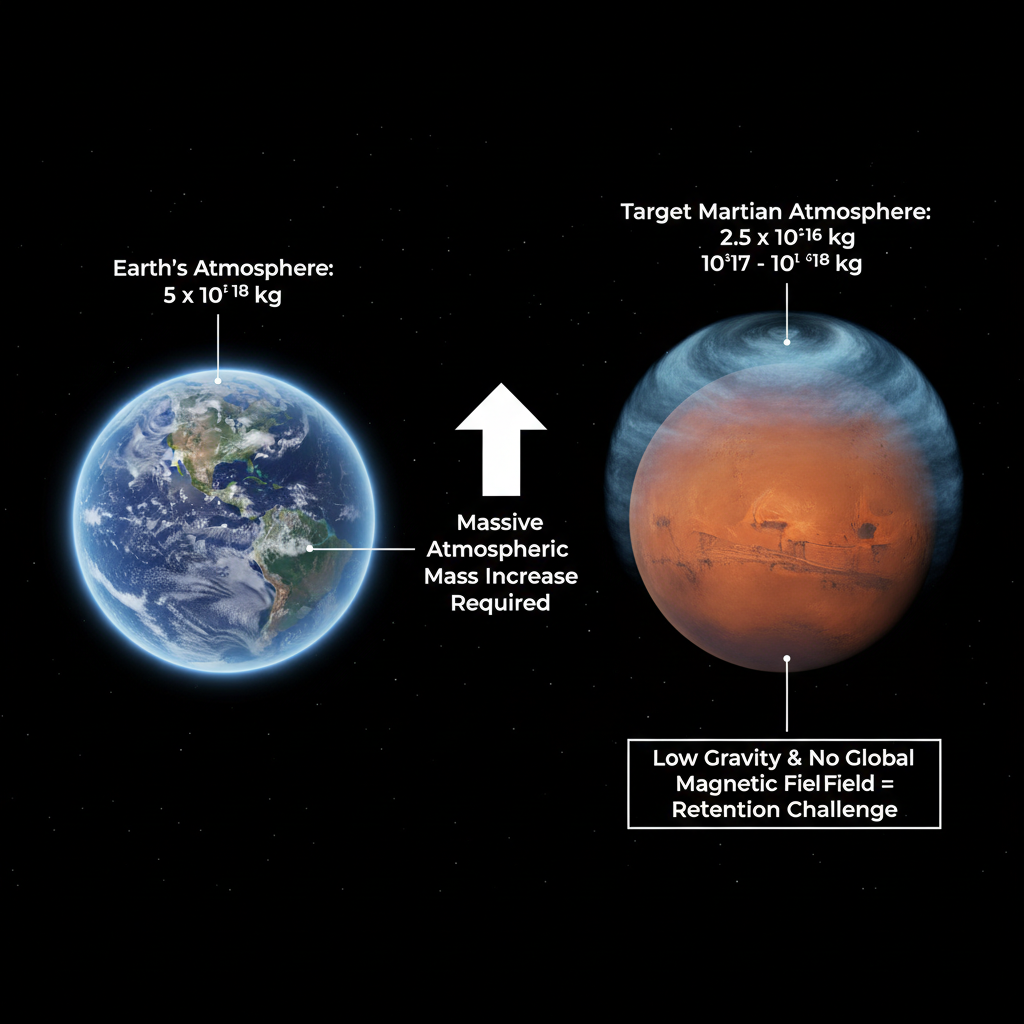
Um estudo pioneiro do Jet Propulsion Laboratory quantifica os desafios monumentais da terraformação de Marte, revelando que a transformação global exigiria massas atmosféricas e capacidades industriais em escalas de exatoneladas e petawatts, muito além das capacidades atuais da humanidade. A pesquisa, liderada pelo Dr. Slava G. Turyshev, estabelece que, embora a paraterraformação regional seja plausível a curto prazo, a habitabilidade planetária completa só seria viável com um fornecimento massivo de voláteis e controle climático sustentado por séculos ou milênios, oferecendo uma análise rigorosa dos obstáculos físicos e de engenharia.
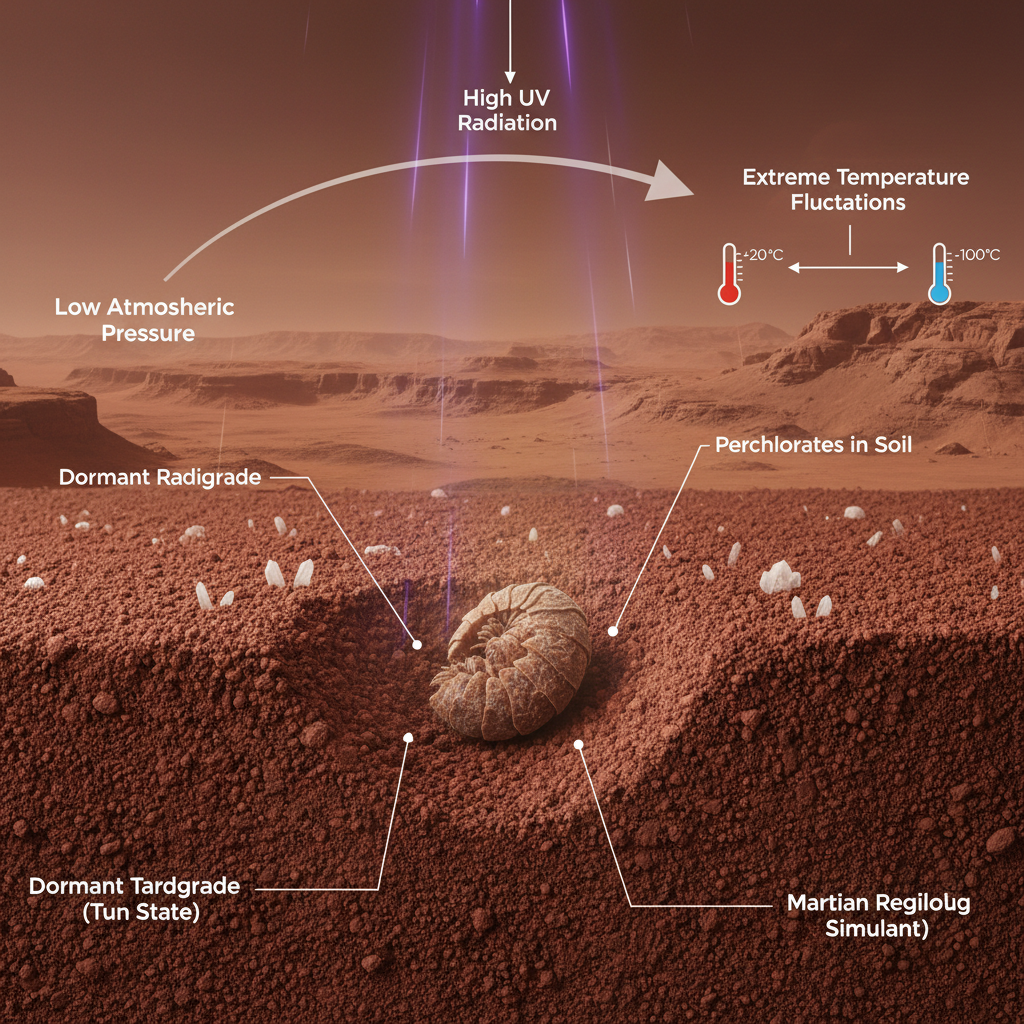
Tardígrados em Marte: A Resiliência Improvável da Vida Terrestre
Cientistas investigaram a capacidade de sobrevivência de tardígrados em simulantes do solo marciano, um passo crucial para entender a habitabilidade de Marte para futuras missões humanas. Os resultados indicam que, embora o solo marciano seja tóxico para os tardígrados em estado ativo, a lavagem do material reduz os efeitos negativos, sugerindo que a composição química específica, e não o pH ou a concentração de solutos, é o principal fator prejudicial. Este estudo aprofunda nossa compreensão sobre os limites da vida terrestre e as possibilidades de estabelecer ecossistemas em Marte.